|
Hi Alan.
Yes, there is going to be some significant displacement of oil
with this actuator design. I haven't disassembled the actuators yet but am
anticipating what you described for the end switches.
The bladder system is still in the works but I am
leaning towards using another "boot" made of rubber as the bladder. I'm going to
get a couple of CV joint boots and plumb them to the actuator/bellows so the oil
can re-locate into and out of the actuator/bellows. I have a small space between
the stainless ballast tank and the hull that will hold the bladders.
I like the easy availability of these boots, and their low cost.
I found a website that shows the dimensions of each different boot they
make ( about a hundred different ones ) then cross referenced what vehicles they
fit. Just went down to the auto parts store and ordered the ones I needed. Real
easy to get new ones. Some are only $6 ea. Takes one day to get them.
BLADDER DESIGN: The CV joint boot
fits over a 4 inch dia. PVC reducer bushing with a 1/2 inch female
threaded hole in the bottom. This 1/2 inch hole will be plumbed to the fitting
on the actuator bellows. The aluminum end caps on the actuators need a
small hole drilled in them for oil transfer as the actuator rod
extends/retracts.
I had considered a common oil reservoir with a spring
and diaphragm, with tubes running to each actuator, but by using the
aforementioned space the plumbing lines will be very short, and a failure on one
won't affect the other two. ( total of three, 2 dive planes and one for
the rudders)
Access for maintenance will be simply a matter of removing the front FRP
fairing and the actuators and oil reservoirs are right there. It's all
located behind the 12 gage stainless ballast tank so isn't exposed to bumps or
entanglement. I've made the front and rear FRP fairings easy to install, and
most everything that can get tangled up is under them, protected from impact and
sea weed, etc.
I found some actuators made by MinnKota that have a better "waterproof"
rating. ( IP68 versus IP54 ) The problem is two-fold.
First, they are $259 each, or about the same as I paid for the MinnKota
motors. The second problem is they have a 2 inch stroke. Lenco makes some as
well. Even with the higher rating, they're still not made for anything below
about 10 feet deep.
The plus to this is they have a switch panel that shows the relative
position of the actuator with an LED bar graph. I'm just using $18 rocker
switches mounted on the face of the control box, so I won't be able to tell
where the dive plane position is without something else to sense that. ( still
working on that one.)
This is probably going to end up as "more windows" but for now I'm just
trying to get "in the water."
The silicone oil you are using is probably the best. Viscocity isn't a real
issue here.
I'll try and get some more pics up as this progresses.
PROBLEM I think the depth rating of
this idea is probably quite shallow, and when I upgrade to greater depths a HP
hydraulic system will be needed for actuators, but with the oil compensation
system and the relative low cost of components, it'll make a good test bed and
is quick and simple. Upgrading to HP hydraulics should be relatively simple,
although a little pricey when the time comes.
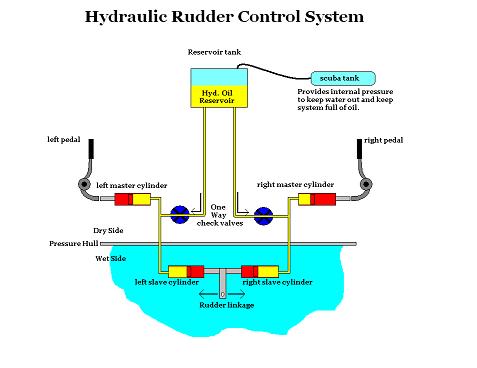
On a side note .......I did some work on a steering design
using master/slave hydraulics. Here's a sketch.
Let me know what you think.
Frank D.
|